Nejste přihlášen/a.
Zdravím, potřeboval bych poradit.
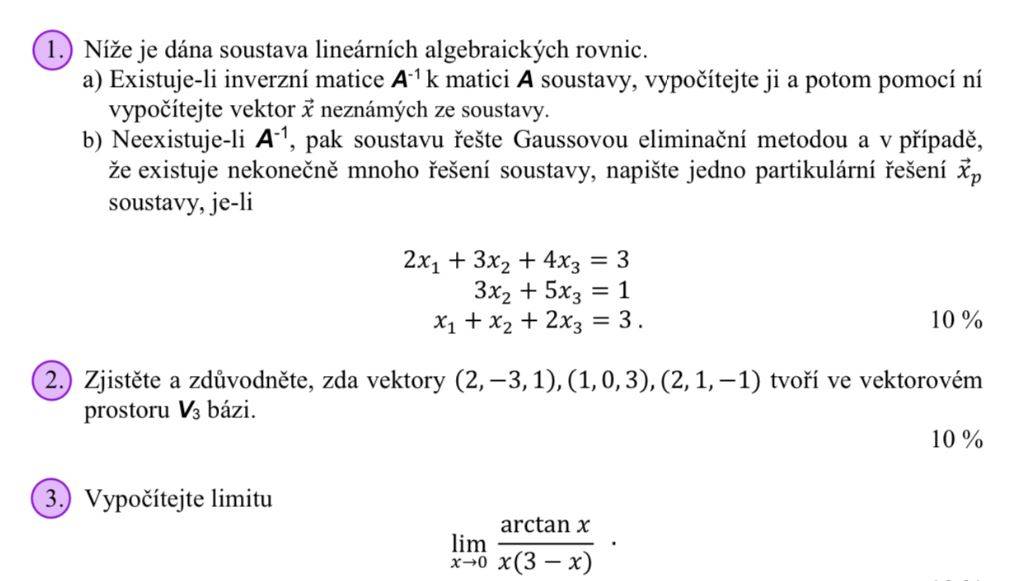
1) tu matici A vezmu z té soustavy? Jaký je postup?
2) u báze jsou nějaké dvě podmínky, co vím, tak by měly být lineárně nezávislé, což mi vyšlo, Takže pokud platí ještě druhá podmínka, tak by ji tvořit měly.
3) vyšlo mi 1/3, ok?
doplněno 30.12.19 13:04:
Když už jsme u těch matic, tak bych potřeboval ještě poradit s jednou rovnicí. To X mám vyjádřit jako X = -H / (G - 1)?
a ty podmínky?

1x

VZKAZ: Založ novou otázku, v této ti @kartaginec už nemůže poradit !
Případně pokračuj TADY...
0x

Báze skutečně musí být nezávislá, což Vám (správně( vušlo. Pak generuje prostor, jehož dimense je rovna počtu těch nezávislých vektotů, čili ty podmínky zde jsou, že ty vektory jsou nezávislé a jsou tři.
Tu limitu máte dobře.Ä jaký je postup u řešení? To záleží na tom? jestli existuje ta inverzní matice nebo ne. A to se pozná jak?

0x
Tady je odkaz na soubor, kde je to popsáno
Myslím si, že příklad 2 by měl být takto (ale možná se mýlím)
Když je třemi vektory tvořena báze, tak vektory jsou navzájem kolmé a třetí z nich je vektorovým součinem těch dvou
u (u1, u2, u3)
v (v1, v2, v3)
u x v = (u2 krát v3 - u3 krát v2 , u3 krát v1 - u1 krát v3, u1 krát v2 - u2 krát v1)
(2, -3, 1) x ( 2,1,-1) = (1, 4, -4)
Vektory netvoří bázi
doplněno 29.12.19 11:37:
Tak jsem se zmýlil.
Dvě podmínky existence báze jsou uvedeny zde
B je báze vektorového prostoru V, pokud platí:
⟨B⟩=V
B je lineárně nezávislá množina vektorů.
A pokud je B lineárně nezávislá, tak generuje prostor, jehož dimenze je rovna počtu těchto vektorů. No a jsou -li tři ve vektorovém prostoru V dimenze tři, pak musí (ve spojení s tou lineární nezávislostí) generovat V; obecně lze ty dvě podmínky také formulovat tak, že vektory jsou lineárné nezávislé a jejich počet je roven dimensi prostoru, v němž pracijeme. Je pravda, že tato formulace pracije se zxnalostí dimenze daného prostou, která v první formulaci číselně explicitně nevystupuje.
0x
K příkladu 2.
Matice soustavy A je matice,vytvořená z koeficientů soustavy rovnic; správně píšete, že bude mít první řádek 2 3 4, tedy bude to matice
2...3...4
0...3...5
1...1...2
(ty tečky tam píšu proto, aby se to nesmrsklo a udrželo to formátování. ) Matice, kde přidám ještě pravou stranu , tedy vektor b = 3, 1, 3., , chápaný jakosloupcová matice, se nazývá rozšířená matice soustavy. Jestliže ještě vektor proměnných x= x1,x2,x3 zapíšeme jako sloupcový vektor (sloupcotou matici se třemi řádky a jedním sloupcem), můžeme soustavu zapsat v maticovém tvaru v podobe
A*x = b.
Kmatici A může existovat inverzní jentehdy, je-li maticeA čtvercová,ale není to podmínka postačující. V našempřípadě ale existuje (matice je regulérní),jak jste se přesvědčil sám výpočtem, a pak lze řešení x (v podobě sloupcové matice) zapsat
x = A-1*b
čímž je vše vyřešeno.
(Kdyby A regulérní nebyla, platilo by tvrzení, že soustava má řešení právě tehdy, je-li hodnost matice soustavy rovna hodnosti matice rozšířené. Při hledání tohoto řešení lze použít Gaussovu eliminační metodu, která se opírá o provádění ekvivalentnívh řádkovývh úprav soušasněnamatici A anapravou stranu )tedy vlastně na matici rozšířenou) tak,abychom v matici A nakonec dostali pod hlavní diagonálu nuly. Ale v tomto případě to není třeba ~ i když je to taé možnost – a tak to nebudu rozvádět.
Neneseme odpovědnost za správnost informací a za škodu vzniklou jejich využitím. Jednotlivé odpovědi vyjadřují názory jejich autorů a nemusí se shodovat s názorem provozovatele poradny Poradte.cz.
Používáním poradny vyjadřujete souhlas s personifikovanou reklamou, která pomáhá financovat tento server, děkujeme.